Summarizing Distributions
POLI_SCI 403: Probability and Statistics
Agenda
- Revisit random variables
- Summarizing random variables
- Lab
Last week
In your own words, what is a random variable?
- Discrete random variables have a PMF
- Continuous random variables have a PDF
In either case, they are just functions:
\[ f(x) = Pr[X = x] \]
The important part is that we can operate on them, meaning we can theorize about producing single number summaries that describe them
Expected value
Discrete:
\[ E[X] = \sum_x x f(x) \]
Continuous:
\[ E[X] = \int_{-\infty}^{+\infty} xf(x)dx \]
Expected value
Discrete:
\[ E[X] = \sum_x x f(x) \]
Continuous:
\[ E[X] = \int_{-\infty}^{+\infty} xf(x)dx \]
Why do we like the expected value?
We said a function applied to a random variable yields a random variable
But an operator of a random variable can be treated as a constant
So we can think of them as (theoretical) one-number summaries of a random variable
Rules of expectations
- If \(a\) is a constant, then \(E[a] = a\)
- Extension: \(E[aX] = a E[X]\)
- \(E[X_1 + \ldots + X_p] = E[X_1] + \ldots + E[X_p]\)
Expectations of summations are summations of expectations (ESSE)
Rules of expectations
If \(a\) is a constant, then \(E[a] = a\)
Extension: \(E[aX] = a E[X]\)
ESSE: \(E[X_1 + \ldots + X_p] = E[X_1] + \ldots + E[X_p]\)
- \(E[b_1X_1 + \ldots + b_pX_p] = b_1E[X_1] + \ldots + b_pE[X_p]\)
Expectations of weighted summations are summations of weighted expectations (EWSSWE)
Rules of expectations
If \(a\) is a constant, then \(E[a] = a\)
Extension: \(E[aX] = a E[X]\)
ESSE: \(E[X_1 + \ldots + X_p] = E[X_1] + \ldots + E[X_p]\)
EWSSWE: \(E[b_1X_1 + \ldots + b_pX_p] = b_1E[X_1] + \ldots + b_pE[X_p]\)
- #3 and #4 are true even if random variables are not independent
- These rules make up a very important property
Linearity of expectations
Let \(X\) and \(Y\) be random variables, then \(\forall a, b, c \in \mathbb{R}\)
\[ E[aX + bY + c] = a E[X] + bE[Y] + c \]
Implication: Expected value is a linear operator
Meaning we can rearrange terms for easier calculation
For other things, linearity is not true unless you are explicitly told otherwise
More generally
We can describe a random variable by its moments
\(\mu'_j = E[X^j]\) is the \(j\)th raw moment
So \(E[X] = E[X^1] = \mu'_1\) is the first raw moment
More generally
\(\mu'_j = E[X^j]\) is the \(j\)th raw moment
Raw moments describe “location”
Sometimes we also want to characterize “spread”, independent from the expected value
\[ \mu_j = E[(X - E[X])^j] \]
is the \(j\)th central moment
Because they convey spread centered in the expected value
Central moments
The first central moment is
\[E[X-E[X]]\]
Central moments
The first central moment is
\[E[X-E[X]] \\ = E[X] - E[X]\]
Central moments
The first central moment is
\[E[X-E[X]] \\ = E[X] - E[X] \\ = 0\]
Which is not very useful
Central moments
The second central moment is
\[ E[(X - E[X])^2] \]
Central moments
The second central moment is
\[ E[(X - E[X])^2] \]
Which is called variance
Central moments
The second central moment is
\[ V[X] = E[(X - E[X])^2] \]
Which is called variance
Rearrange to something more applicable:
\[ V[X] = E[X^2] - E[X]^2 \]
Central moments
The second central moment is
\[ V[X] = E[(X - E[X])^2] \]
Which is called variance
Rearrange to something more applicable:
\[ V[X] = E[X^2] - E[X]^2 \]
Why do we stop at the second central moment?
Other central moments are conceptually distinct but not as important for social science applications (more in the lab)
Variance is expressed in squared terms, but if you take the square root you get a measure in units of \(X\)
\[\sigma[X] = \sqrt{V[X]}\]
Which is called the standard deviation
Joint distributions
Sometimes what we want to convey is the relationship between two random variables.
Joint distributions
We can generalize the formula for variance to the bivariate case, which gives the covariance
\[ \text{Cov}[X,Y] = E[(X-E[X])(Y-E[Y])] \]
Alternative formula
\[ \text{Cov}{[X,Y]} = E[XY] - E[X]E[Y] \]
Joint distributions
We can generalize the formula for variance to the bivariate case, which gives the covariance
\[ \text{Cov}[X,Y] = E[(X-E[X])(Y-E[Y])] \]
Alternative formula
\[ \text{Cov}{[X,Y]} = E[XY] - E[X]E[Y] \]
Why do we like the covariance?
- It conveys how much \(X\) and \(Y\) travel together
- Positive: \(\uparrow X \Rightarrow \uparrow Y\)
- Negative: \(\uparrow X \Rightarrow \downarrow Y\)
Correlation is rescaled covariance (0 to 1)
\[ \rho[X,Y] = \frac{\text{Cov}[X,Y]}{\sigma[X] \sigma[Y]} \]
Aside: Rank correlation
\(\rho\) is Pearson’s correlation
\[ \rho[X,Y] = \frac{\text{Cov}[X,Y]}{\sigma[X] \sigma[Y]} \]
Spearman’s
\[ r_s = \rho[R[X], R[Y]] = \frac{\text{Cov}[R[X],R[Y]}{\sigma[R[X]] \sigma[R[Y]]} \]
Aside: Rank correlation
Kendall’s
\[ \tau = \frac{(\text{# concordant pairs}) - (\text{# discordant pairs})} {(\text{# total pairs})} \]
concordant: \(x_i > x_j\) and \(y_i > y_j\) OR \(x_i < x_j\) and \(y_i < y_j\)
discordant otherwise
Aside: Correlation in R
Why do we like the covariance?
- It conveys how much \(X\) and \(Y\) travel together
- It reminds us that the variance is NOT a linear operator
Variance rule
\[V[X+Y] = V[X] + \color{purple}{2\text{Cov}[X,Y]} + V[Y]\]
Unless \(\color{purple}{\text{Cov}[X,Y]} = 0\)
Meaning?
Independence
What does it mean for \(X\) and \(Y\) to be independent?
Knowing the outcome of one random variable provides no information about the probability of any outcome for the other.
Consequences of independence
- \(E[XY] = E[X] E[Y]\)
- \(\text{Cov} [X,Y] = 0\)
- \(V[X+Y] =V[X] + V[Y]\)
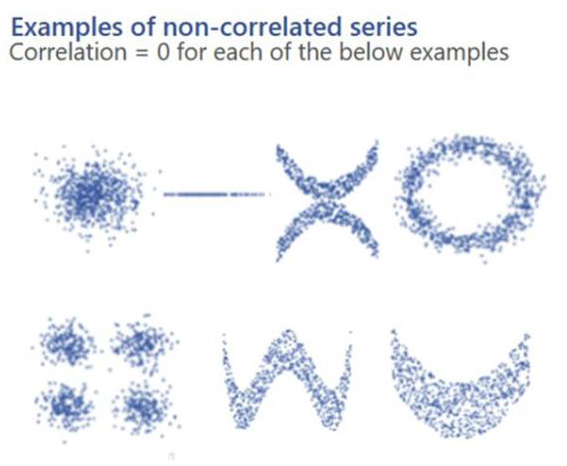
\(\rho [X,Y] = 0\) does not imply independence!
Why?
Measuring fit
Central moments are centered around the expected value
Example:
\[ V[X] = E[(X - E[X])^2] \]
But we can technically center them on anything we want to
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
This is called the
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
This is called the Mean
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
This is called the Mean Squared
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
This is called the Mean Squared Error
Measuring fit
\[ E[(X-\color{purple}c)^2] \]
This is called the Mean Squared Error around \(\color{purple}{c}\)
Measuring fit
\[ MSE = E[(X-\color{purple}c)^2] \]
Plugging \(\color{purple}{c = E[X]}\) minimizes MSE (cf. Theorems 2.1.23 and 2.1.24)
That’s because you can rearrange to
\[ E[(X-\color{purple}c)^2] = V[X] + (E[X]-\color{purple}c)^2 \]
Measuring fit
\[ MSE = E[(X-\color{purple}c)^2] \]
Plugging \(\color{purple}{c = E[X]}\) minimizes MSE (cf. Theorems 2.1.23 and 2.1.24)
That’s because you can rearrange to
\[ E[(X-\color{purple}{E[X]})^2] = V[X] + (E[X]-\color{purple}{E[X]})^2 \]
\[ = V[X] \]
Best predictor
We can say that \(E[X]\) is the best predictor of \(X\) because it minimizes the MSE
This also extends to conditional expectation functions (CEF)
CEF \(E[Y|X]\) minimizes MSE of \(Y\) given \(X\)
Wait hold on
Conditional expectation function
Discrete:
\[ E[Y|X=x] = \sum_yyf_{Y|X}(y|x) \]
Continuous:
\[ E[Y|X=x] = \int_{-\infty}^{+\infty}yf_{Y|X}(y|x)dy \]
Conditional expectation function
Note that we can also have
\[ G_Y(X) = E[Y|X=X] = E[Y|X] \]
To denote the random variable that results from applying the CEF (which is technically many functions) to \(X\)
We can just move on with calling \(E[Y|X]\) the CEF
Properties of conditional expectations
- Linearity (same as with unconditional expectations)
Properties of conditional expectations
Linearity (same as with unconditional expectations)
Law of Iterated Expectations:\(E[Y] = E[E[Y|X]]\)
Properties of conditional expectations
Linearity (same as with unconditional expectations)
Law of Iterated Expectations:\(E[Y] = E[E[Y|X]]\)
Law of Total Variance:
\[ V[Y] = \underbrace{E[V[Y|X]]}_\text{Avg variability within X} + \underbrace{V[E[Y|X]]}_\text{Variability across X} \]
Best linear predictor
CEF \(E[Y|X]\) minimizes MSE of \(Y\) given \(X\)
If we restrict ourselves to a linear functional form \(Y = a + bX\)
Then the following minimizes MSE of \(Y\) given \(X\):
- \(g(X) = \alpha + \beta X\) where
- \(\alpha = E[Y] - \frac{\text{Cov}[X,Y]}{V[X]}E[X]\)
- \(\beta = \frac{\text{Cov}[X,Y]}{V[X]}\)
Wrapping up
Do you need to memorize these properties?
No, but a lot of the theory behind fancy methods relies on playing with the properties of expected values/moments of random variables
Down the line: Averages (and average-like things) have statistical properties that make them good one-number summaries (most of the time)
You need a strong case to not use means or conditional means